一、项目名称
远程控制水下机器人
二、所属领域
先进制造与高端装备制造
三、技术成熟度(参照GB/T22900-2009和附件)
四、制造成熟度
五、市场成熟度
六、领先水平
国内领先
七、项目介绍
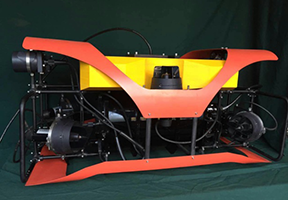
远程控制水下机器人是一种集水下探测、远程遥控、智能控制、特种作业为一体的先进水下无人航行器(ROV),与传统的产品等水下航行器不同,其采用开架式布局、多推进器矢量推进、水面供电、有缆操控的工作模式,可替代潜员实现水下远程实时在线监测和水下作业,能够很好地满足水下物探、监测、安防、搜救以及科研等复杂作业环境下特种作业需求,在国防军事和民用领域应用非常广泛。
项目在充分发挥我国在水中兵器行业取得的控制、通信、导航定位、动力、信息获取与处理、安全回收等具备国际领先水平的军工技术优势的基础上,与国内海洋石油开采、环境监测、水下安防和应急等特种行业相结合,通过流体动力布局、总体结构、控制系统、作业平台操控系统、甲板供电、水下大容量多用户光纤信息传输等军用科技成果转化,突破了多推进器复合控制、自主动力定位、系缆阻力补偿、多自由度矢量推进等多项低速小型开架式水下航行器核心技术,先后完成原理样机及工程样机研制。项目开展了矢量推进器、水下机械手、导航、定位、水下通信、水声探测等民用潜器关键设备的国产化研制,实现水面遥控、矢量推进、动力定位、实时在线视频观测以及外部供电等关键技术验证。
项目所研制的水下机器人能够满足湖泊、水库、港口等静水条件下的观测作业,应用于水下设施巡检和简单维护、水下辅助施工、水下突发事件现场信息探测和快速获取、水下安防和勘察、现场应急救援以及水下科靠等作业,可替代进口,解决海上防御、水下安防和海洋资源开发等领域急需的技术手段,摆脱目前受制于人的困境。具有广阔的需求背景。
目前已成功研发ROV5001及ROV5002型远程控制水下机器人等两型样机及部分水声探测、水下定位设备,所研发的产品可满足目前国内主要水下作业的需求。
八、技术指标
|
项目 |
指标 |
|
尺寸 |
长900mm,宽740mm,高800mm |
|
重量(空气中) |
总重90kg |
|
速度 |
前进后退3Kn,其它方向1~2Kn |
|
工作深度 |
20m |
|
带载能力 |
12kg |
|
动力形式 |
水平4环形布局双向推进器 垂直2平行布局双向推进器 |
|
推力 |
水平推力35kg、垂直推力17kg、侧向推力17kg |
|
脐带缆 |
光电复合缆:长度100m,外径18mm,拉断力6000N |
|
观测载荷 |
两个彩色高清摄像头,两盏照明灯 |
九、技术特点
本项目产品创新地采用了两组矢量推进器作为主推进,实现了推进系统的矢量化,大幅提高了水下姿态控制能力,与现有同类型产品相比,不仅具有更好的抵抗洋流等外部扰动的能力、机动性能更优异,并且具备水下航行和悬停姿态变化能力,更适应于涵洞、水坝、桥墩等特殊环境的勘测,同时降低功率需求,具有更好的经济性。产品技术特点如下:
1.多自由度矢量推进
多自由度矢量推进将推力输出技术与位置控制技术有机结合,实现单一推进器多自由度的推力输出。
2.多矢量推进器复合控制
采用多台矢量推进器的装备配置,为水下机器人运动提供了极佳的控制裕度,极大地提高了姿态控制能力。
3.自主动力定位
在较强浪涌、海流等外界环境干扰下,能够依靠矢量推进器复合输出推力,实现姿态稳定的保持在某一固定位置。
4.系缆阻力补偿
通过姿态、加速度的信息融合,对不断变化的系缆阻力状态实时在线估计,依靠多矢量推进器的复合控制进行补偿,保证姿态的稳定控制。
十、适用范围
水下作业、水下探测、深海资源开发。